





10 сентября в Симферополе в рамках «Крым Урбан Форума» объявят победителей «Крым Урбан Премии».


![]()

Вы здесьРеализация БАВР на секциях шин с двигательной нагрузкой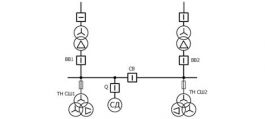 Реализация БАВР на секциях шин с двигательной нагрузкой Рассмотрим проблему реализации синхронного включения секционного выключателя в комплексе быстродействующего автоматического ввода резерва. Одно из требований к БАВР – включение секционного выключателя в момент, когда вектора напряжения на «здоровой» секции шин и ЭДС обобщенного двигателя, выбегающего на секцию шин, потерявшую питание имеют небольшое расхождение по фазе (в [1] указан диапазон в 30⁰). Требование обосновано, так как позволяет минимизировать значение переходного тока при включении, но ненулевое время включения секционного выключателя ( ), методические погрешности в определении угла и частоты в цифровых блоках и игнорирование скорости изменения частоты могут привести к нарушению этого требования. Рассмотрим режим потери питания на секции шин №1 (СШ1), к которой подключен синхронный двигатель (СД). Примем что напряжение на «здоровой» секции шин №2 (СШ2) неизменно по модулю и частоте (см. рис. 1).
Рисунок 1 Уравнение движения вектора напряжения СШ2 есть: φ_СШ2=ω_ном·t+φ_(0 СШ2)
где φ_СШ2 – текущая фаза, рад;
ω_ном – номинальная круговая частота (угловая скорость), рад/с;
φ_(0 СШ2) – начальная фаза, рад.
Закон движения вектора напряжения СШ1 зависит от закона выбега двигателям. При потере питания напряжение на СШ1 индуцируется только полем возбуждения двигателя. В общем виде закон выбега двигателя есть II-й закон Ньютона для вращающихся тел
J (d^2 φ)/(dt^2 )=M (1) где J – момент инерции вращающихся масс, кг·м^2; При двукратном интегрировании уравнения (1), в процессе нахождения зависимости , возникает две константы, определяемые начальными условиями: φ_0 – начальный угол (угол в начальный момент времени), рад; Проанализируем каждый из этих параметров и оценим погрешность по углу включения, к которой приводит неточное знание каждого из этих параметров. Частота Примем, что алгоритм без погрешности рассчитывает мгновенную частоту, но имеет некоторое окно усреднения для повышения надежности результата (например, стандарт [2] регламентирует расчет частоты не более, чем за 60 мс). Это приводит к тому, что при усреднении значений за время , при линейно меняющейся частоте, алгоритм будет давать погрешность равную: ∆f=-f ̇ T_(уср.)/2 (2) (2) где f ̇ – скорость изменения частоты, Гц⁄с;
T_(уср.) – время усреднения, с.
Использование частоты с погрешностью (2) при оценке угла, на который повернется вектор напряжения за время включения выключателя, приведет к погрешности по углу равной: ∆φ_1=2π·∆f·T_вкл (3) При этом действительный вектор успеет описать большую дугу, чем это следует из расчета. Угол Для анализа погрешности по углу рассмотрим переход от мгновенных значений к векторам через выделение основной гармоники с помощью разложения сигнала в ряд Фурье: С=∫_(t-T)^t▒〖jy·e^(-jωt) dt〗 Так как частота входного сигнала отличается от частоты, используемой для вычисления ортогональных составляющих, то функция под интегралом равна: y=A∙sin((ω+∆ω)t+φ) (4) Точное выражение после взятия интеграла имеет вид: C=A∙sinλ∙[1/λ e^j(∆ωt+φ-λ) -1/(2π+λ) e^(-j((2ω+∆ω)t+φ-λ) ) ] Отсюда следует, что вектор имеет низкочастотную составляющую . Однако в дополнение к этому (в соответствии с АЧХ ДПФ) изменилась амплитуда вектора (в раз) и добавилась высокочастотная составляющая . Конец вектора при этом описывает гипоциклоиду. Для темы статьи важно, что вектор в среднем всегда отстает от «реального» вектора на угол : λ: ∆φ_2= π ∆ω/ω (5) Закон выбега Выбег двигателя описывается уравнением [5, 6, 7]: (dω ̂)/dt=-k_зг/τ_j [m_0^'+(1-m_0^' )·ω ̂^γ ] (6) где k_зг – коэффициент загрузки двигателя по активной мощности;
τ_j – постоянная инерции системы двигатель – приводной агрегат, с;
m_0^' - приведенный начальный момент сопротивления, M_0/(k_зг·M_ном );
ω ̂ – приведенная угловая скорость, ω/ω_ном .
Темп выбега определяется начальным ускорением ((dω ̂)/dt)_(t=0)=-k_зг/τ_j =ε ̂_0.
Для функций ожидания и улавливания синхронизма при выполнении прогноза значения угла может быть использовано предположение о том, что за время включения выключателя частота не меняется. В этом случае погрешность по углу равна:
∆φ_3= ε·(T_(вкл.)^2)/2 (7)
где ε – угловое ускорение (производная частоты), рад⁄с^2 .
Все погрешности имеют одинаковый знак и могут привести к тому, что действительная фаза вектора в момент включения СВ будет отличаться от фазы напряжения «здоровой» СШ более, чем допускается по расчетам. На рисунке 2 приведены погрешности по углу в зависимости от значения начального ускорения при использовании быстродействующего выключателя ВВМ-СЭЩ-3-10-31,5/1600БАВР c блоком управления БУВВ-СЭЩ-Б1-4 с временем включения 30 мс. На рисунке 3 то же при использовании небыстродействующего выключателя с временем включения 50 мс (время включения современных выключателей может доходить до 100 мс).
Рисунок 2
Рисунок 3 Постоянная инерции для газоперекачивающих агрегатов с электродвигателями СТД-4000-2 и нагнетателем 280-12-7 равна 3,25 с, что позволяет вычислить начальное ускорение при выбеге - 96,6 рад/с^2. По графикам видно, что только методическая погрешность будет составлять 7 и 18 градусов соответственно. При больших значениях начального ускорения и выключателях, включающихся за 70-100 мс методическая погрешность будет составлять десятки градусов! В устройстве БМРЗ-БАВР производства ООО «НТЦ «Механотроника» применяются следующие решения для точного прогнозирования момента включения секционного выключателя:
[1] ПАО «Транснефть». Общие технические требования. Устройства быстродействующего автоматического ввода резерва на основе быстродействующих вакуумных выключателей напряжением более 1000 В. [2] Акционерное общество «Системный оператор единой энергетической системы». Стандарт организации. Релейная защита и автоматика. Автоматическое противоаварийное управление режимами энергосистем. Микропроцессорные устройства автоматической частотной разгрузки. Нормы и требования. – М. 2016
ООО «НТЦ «Механотроника» г. Санкт-Петербург тел. 8-800-250-63-60 Компания: |
Поиск по сайтуКонтакты198206, г.Санкт-Петербург, ул.Пионерстроя, д.23 А
(812) 244-70-15, 8 (800) 250-63-60
(812) 744-45-83
Контекстная рекламаОМП воздушных ЛЭП
Передовые решения для мониторинга ЛЭП 6-35 кВ. Определение места и типа КЗ, дистанционная передача данных. Работа в условиях Крайнего Севера. Возможность тестирования до 12 месяцев.
erid: 2VfnxwytZgt
Реклама. ООО "ДС-ИНЖИНИРИНГ". ИНН 7813413840
АО «Тульский завод трансформаторов»
Завод производит тороидальные тр-ры до 7 кВА, дроссели, однофазные и трехфазные трансформаторы мощностью от 5 до 100кВА.
Шинопровод нового поколения СОЭМИ
Энергоэффективный шинопровод до 7500 А, соответствующий мировым стандартам качества.
Быстрый монтаж кабельных трасс
Кабельные лотки, комплектные фасонные изделия и аксессуары для легкого монтажа трасс различной конфигурации https://km1.ru/catalog/lotok_plus/ Качество и Свет - более 100 000 товаров
Официальный представитель ведущих Российских и мировых производителей и поставщиков. Оптом и в розницу.
Свежий номерРассылкаПодпишитесь на нашу бесплатную рассылку! Новости выставок10 сентября в Симферополе в рамках «Крым Урбан Форума» объявят победителей «Крым Урбан Премии». Международный строительный форум и выставка 100+ TechnoBuild пройдет в Екатеринбурге в 13 раз. Мероприятие предусматривает выставочную часть и крупнейшую среди отраслевых форумов деловую программу. Отечественное энергомашиностроение и импортозаме На форуме «Микроэлектроника 2026» будут обсуждаться как научные и технологические, так и экономические и организационные аспекты развития в нашей стране квантовых коммуникаций. Эта тематика является одной из основных на секции №11 «Квантовые технологии» 12-ой научной конференции «ЭКБ и микроэлектронные модули». В Уфе продолжается подготовка к Российскому энергетическому форуму, 32-й международной выставке «Энергетика Урала» и специализированной выставке «Электротехника. Кабель». |
|
© «Рынок Электротехники», журнал-справочник, 2005 - 2026 127018, г. Москва, ул. Полковая, д. 3, стр. 6, оф. 305 Тел.: (495) 540-52 76 e-mail: reklama@marketelectro.ru За содержание новостей, объявлений и комментариев, размещенных пользователями сайта, редакция журнала ответственности не несет. Вся информация носит справочный характер и не является публичной оффертой. Пользовательское соглашение Новости литературы |
|